The MixCam project aims at combining range or Time-Of-Flight sensors with RGB cameras.
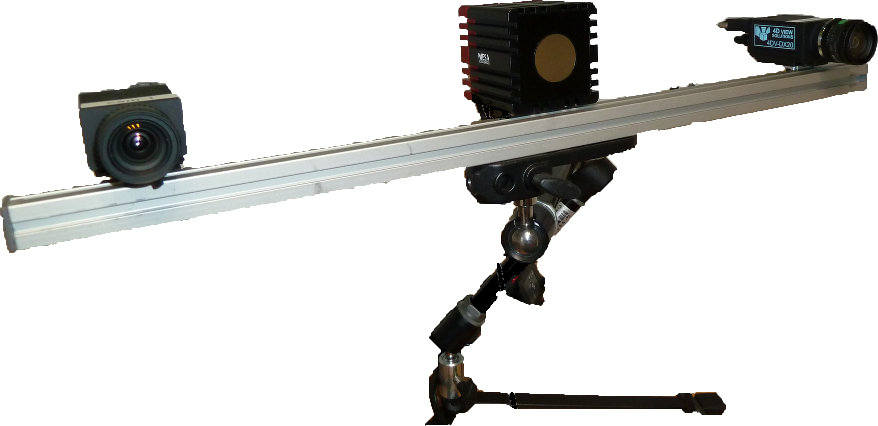
We use systems constituted of one TOF camera, plus a binocular pair of RGB cameras.
We also work with configurations of several such systems.

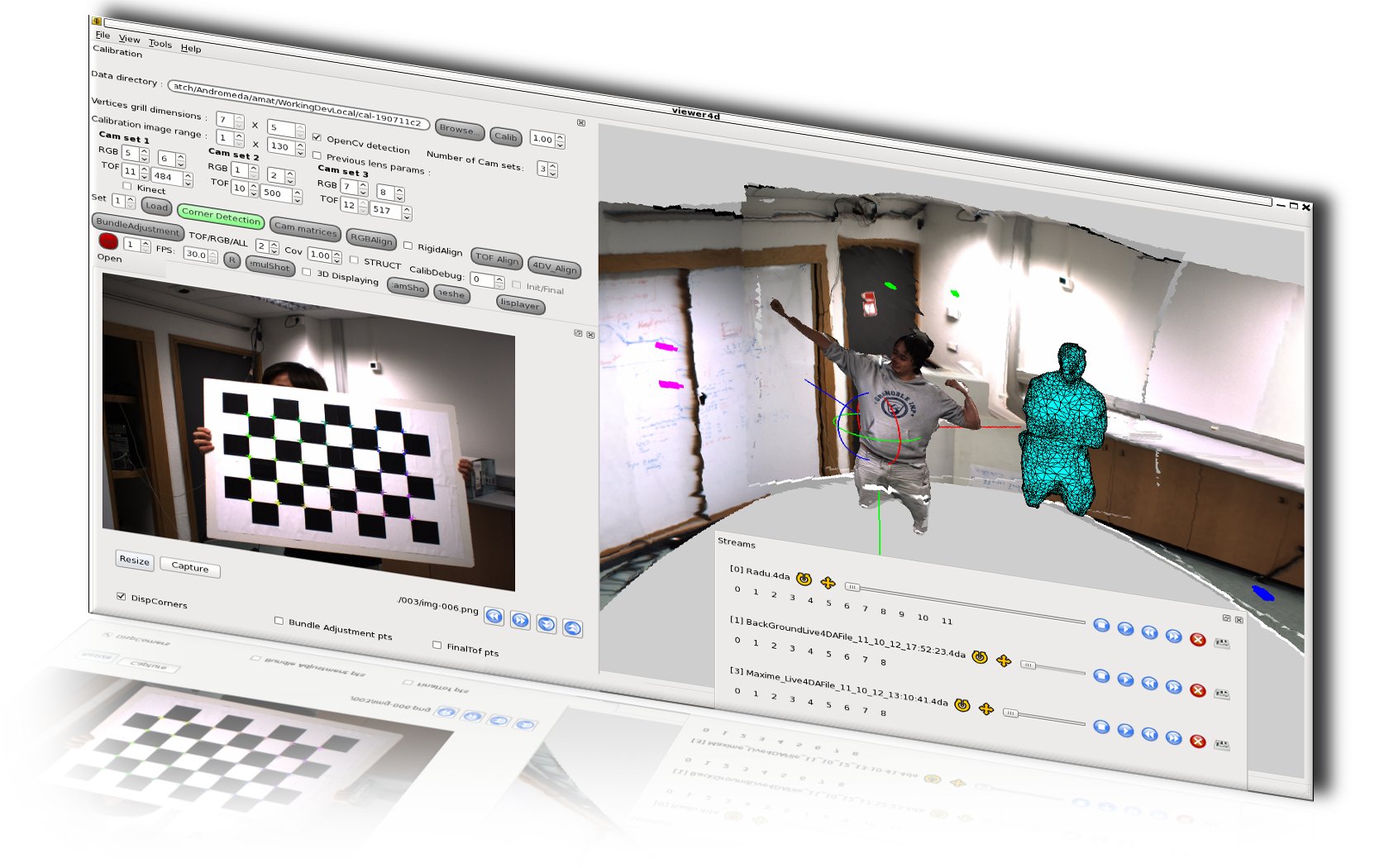
The software allows to calibrate such a multi-camera system, and use it to reconstruct some 3d models.
Camera calibration
Developed by Miles Hansard, the method used for calibrating this multi-camera system was published at CVPR 2011:
Projective Alignment of Range and Parallax Data
M. Hansard,
R. Horaud,
M. Amat
and S. Lee. IEEE International Conference on
Computer Vision and Pattern Recognition, CVPR 2011, 3089-3096. Poster version.
3DModel reconstruction
The 3d model reconstruction process uses the depth data of the Time Of Flight cameras, aligned in a common coordinate system, to construct a mesh, on which the textures from each rgb camera are properly merged.
You can get further information about this method here: mesh_reconstruction_from_tof_data